Sábado 30 noviembre 2010
El único vuelo mas coto de la historia aconteció a nuestros ojos.
Un glorioso ZeroFIGHTER-50 apodado como "Pequeño cabroncete" se dispuso el día de actos a su bautizo de fuego. Caracteristicas: Weight :3,5 kg WinSpan: 1360 mm WingArea:33.2 dm2 WingLoading: 84-87 g/dm2 Airfoil: Naca 2415 Engine: Eléctrico
Enlace motor: TR 50-65B 350kv Brushless Outrunner (Eq: 4030 AXi)
Hélice: 14x7
Pruebas en tierra con Watimetro:
a todo gas
32A 750w
Enlace motor http://www.hobbycity.com/hobbycity/store/uh_viewItem.asp?idProduct=2101
Enlace pruebas base de datos.
http://www.bungymania.com/imageshome/includes3/motorperf1.php?id=38
Montado con sistema de seguimiento con monitorización en tierra.
El despegue fué de libro a medio gas y según los datos de la telemetria a todo gas se alcanzo una velocidad entre 108 y 144 km/h antes del fatal desenlace.
Perdida de referencia de espaldas al sol y con nubes densas por detras, se hizo de repente un punto negro... lo demás es historia.
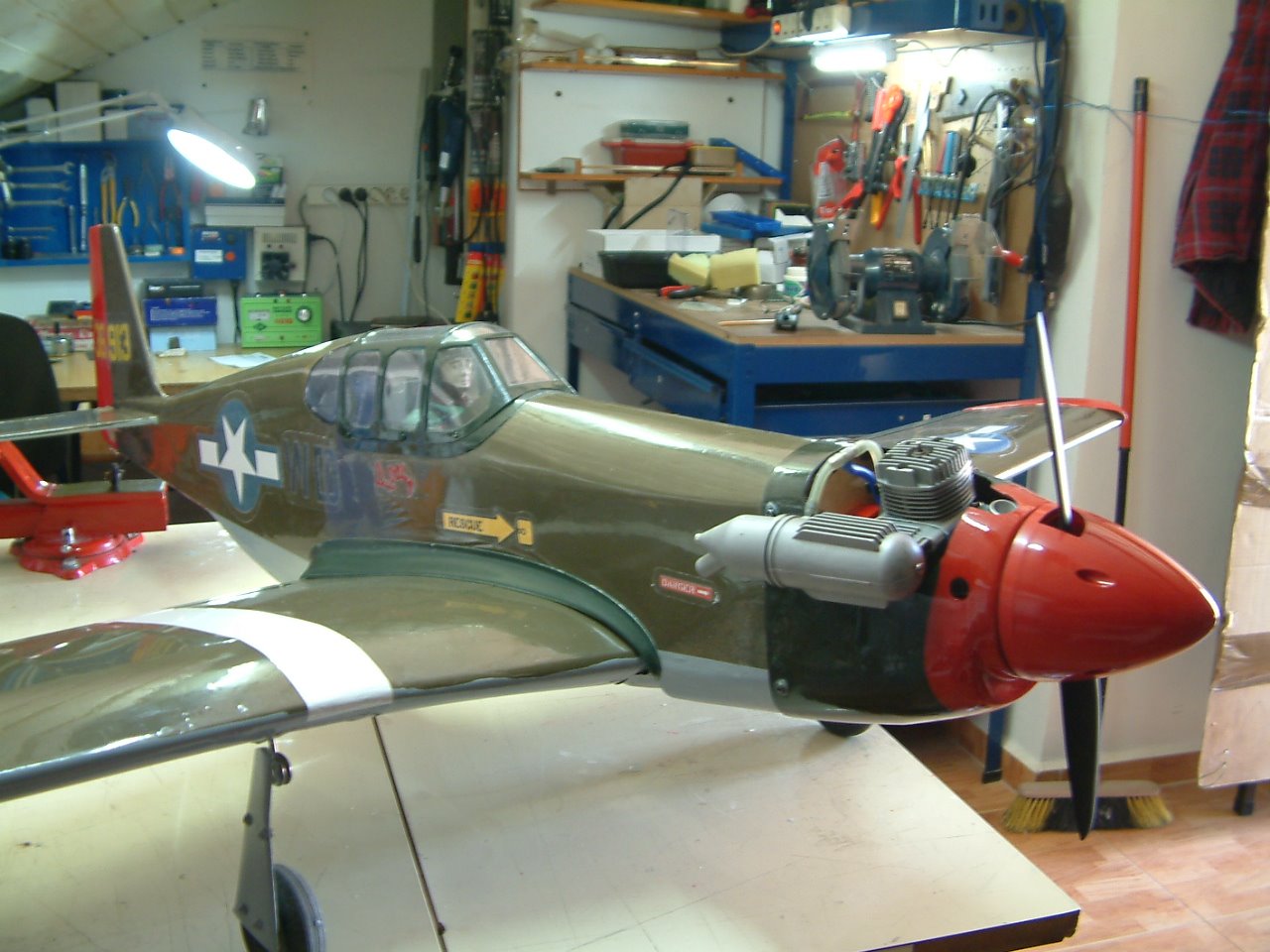
Hace un par de semanas le he pegado un buen golpe al Mustang en un intento de abortar un aterrizaje y cuando le di motor ya hera demasiado tarde para poder con sus 3,5 Kg de peso, metio el ala y el desastre fue total.
Media ala pulverizada y medio fuselaje desintegrado.
Armando el rompecabezas
Algunas costillas van a ser dificiles de copiar por falta de material
Con las astillas que se han podido juntar se hace una plantilla para fabricar los nuevos laterales
Saneando el fuselaje y preparandolo para ensamblar partes nuevas
Pegando uno de los laterales
Pegado de lateral y refuerzos donde ira atornillada el ala
Pegado del segundo lateral
Vista interior de los dos laterales ya pegados
Ahora toca sanear el ala y reparar la estructura principal cerca del diedro que tambien estaba tocada
Montaje de las cuadernas principales, motor y encastramiento del ala, despues se pegaran los refuerzos interiores y se recubrira con balsa de 1,5mm
Reconstruccion de la carena con fibra de vidrio y Epoxi, se envuelve la carena con cinta de embalaje por la parte exterior donde estaban las roturas y se le dan varias capas por dentro de fibra y epoxi
Ya va cogiendo forma
Cuando la fibra y el epoxi endurecen se tapan las inperfecciones por la cara exterior con masilla y se lija todo bien,depues con lija de 800 o mas (cuanto mas fina mejor) se prepara para pintar
Presentacion de como queda la union ala-fuselaje
Preparando el encastre para los largeros nuevos,despues se reforzara la union de los largeros solapando con tiras de contracahapado de 1,5mm
Quien podría imaginar hace 20 años que podríamos pilotar un aeromodelo como si nos llevara la vida en ello.
Pues todo eso y mucho mas se hace posible ahora, ultimamente estos equipos los tenemos al alcance de la mano a un precio razonable.
Esta nueva modalidad dentro del aeromodelismo se llama FPV (Pilotaje por vídeo en primera persona) o UAV (Vehículoaéreo no tripulado) básicamente seria lo mismo salvo que los UAV son capaces de recorrer grandes distancias y volver ellos solos al punto de partida aparte de otras muchas cosas.
Nosotros no vamos a centrar en el FPV,estoy comenzando en esta disciplina y para ello he modificado a un viejo conocido que aunque tiene muchos años y lleva muchos golpes aun se siente con ganas de trabajar.
Se trata del Windstar o lo que queda de el que solo es el nombre, ya que no se parece en nada de lo que era en un principio.
A este viejo velero lo he dotado de un tren de aterrizaje y múltiples reconstrucciones.
Lleva una cámara modelo MSH-36
Estas son sus características:
- Sensor: SONYSUPERHADCCD 1/3"
- Lente: B/D 4 mm con corrección de Infrarrojos
- Revolución: 540 lineas
- Sensibilidad: 0.05 lux
- Gamma: 0.45
- Balance de blanco: Automático
- Compensación de luz: Automático
- Peso: 46 gramos
- Corriente de funcionamient0:
12Voltios (+/- 10%)
- Consumo: 100 mAh
- Tamaño: 35x35x30 mm
La unidad principal es el OSD que mezcla la señal de vídeo superponiendo encima los datos que envía el GPS y el sensor de corriente
.
Esto es lo que vemos en pantalla
- Velocidad km/h
- Distancia al punto de despegue
- Voltajes del motor y de la batería de vídeo
- Consumo instantáneos del motor
- Indicación del estado de energía que le queda a la batería de motor
- Flecha indicadora de vuelta a casa
- Altitud
- Tiempo de vuelo
La recepción de vídeo se realiza a través de un transmisor TX y un receptor RX de video.
He utilizado el modelo a 2,4Ghz de lawmate con 1watio de potencia de emisión
También le he puesto un GPS/GSM/GPRSTracker, es un aparato que lleva una tarjeta de teléfono,en caso de perdida del modelo mandando un SMS desde cualquier móvil que se haya reconocido previamente este envía una respuesta indicando las coordenadas geograficas, velocidad,altura en que se encuentre.
Lleva un receptor sintetizado hiperion unido a un LNA o preamplificador de potencia de antena para 35 Mghz y la antena de radio duplicada para aumentar el alcance de recepción.
Aquí esta el vídeo de la prueba,para ser la primera vez no me he querido alejar demasiado he dado unas cuantas vueltas y me he alejado hasta 1Km y media vuelta.